Logs and Status¶
Logs¶
At the top of the Robot Status page, you can find 2 sections:
Niryo Studio logs: logs produced by the desktop application.
ROS logs: logs produced internally by Ned.
Hint
You can save Ned logs or Niryo Studio logs on a text file.
You can send this file to our technical support to help you in case of problem.
Hardware status¶
In the “HARDWARE STATUS” panel, you can find the hardware status of Ned.
In this section, you can find details about the controller temperature, motors voltage, temperature, and error code.
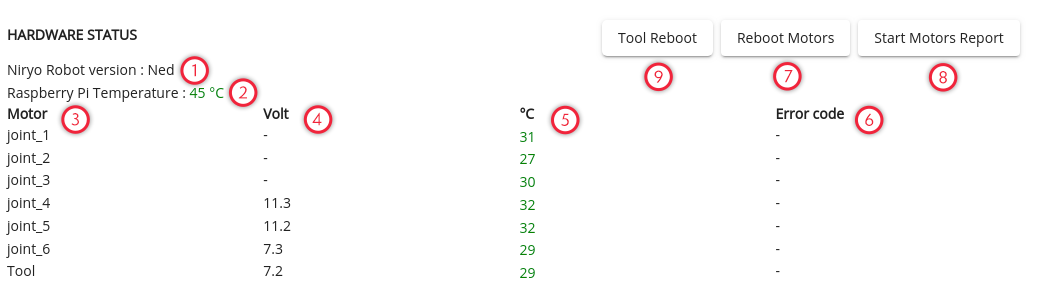
Ned hardware version.
Raspberry Pi temperature: the temperature of the Raspberry Pi is displayed in real time. If it’s displayed in orange or red, that means that something is not normal and the board is too hot. Make sure that your board temperature does not exceed 70°C.
List of connected motors: you should have 6 motors (from Joint_1 to Joint_6), if you have a connected tool, it should appear on the list.
Displayed measured voltage of servo motors (Dynamixels).
Measured temperature of each joint.
Error code: displays error code if there is any. Check troubleshooting chapter to resolve the problem.
Reboot motors: this button reboots servo motors without rebooting the entire robot, this can help you to resolve motors errors.
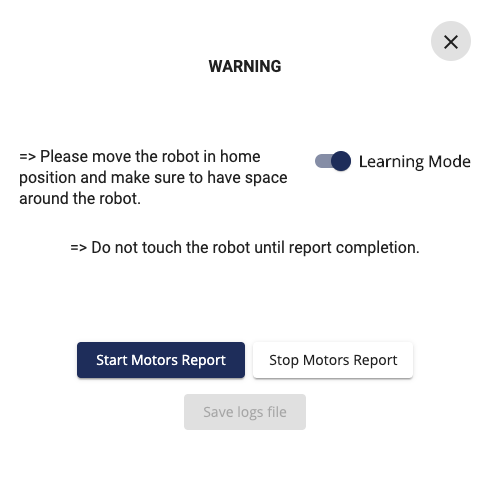
Start motors report: this option helps you to debug Ned. Click the Motor Report button and Start Motors Report.
Tool reboot: this option allows you to reboot the tool’s motor. This button is useful when a motor error occurs.