
Niryo Robot Hardware Interface¶
This package handles packages related to the robot’s hardware.
It launches hardware interface nodes, motors communication and driver.
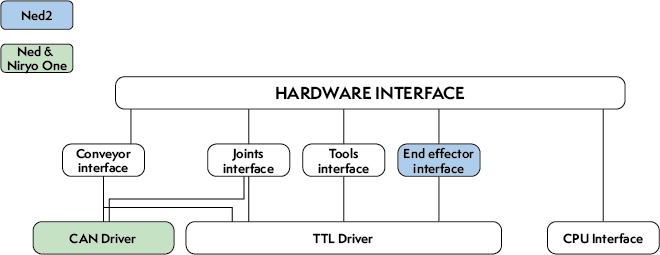
Global overview of hardware stack packages organization.
Hardware interface Node¶
This node has been conceived to instantiate all the interfaces we need to have a fully functional robot.
- Among those interfaces we have:
- Conveyor Interface
- Joints Interface
- Tools Interface
- Cpu Interface
- End Effector Interface (Ned2 only)
- Can Driver (Ned and One Only)
- Ttl Driver
It belongs to the ROS namespace: /niryo_robot_hardware_interface/.
Services, Topics and Messages¶
Published topics¶
| Name | Message Type | Description |
|---|---|---|
hardware_status |
niryo_robot_msgs/HardwareStatus | Motors, bus, joints and CPU status |
software_version |
niryo_robot_msgs/SoftwareVersion | Software version of the Raspberry PI and every hardware components (motors, end effector, conveyors and tools) |