
Joints Interface¶
This package handles packages related to the robot’s joints controller.
It provides an interface to ros_control.
Joints interface node¶
It is instantiated in Niryo Robot Hardware Interface package.
- It has been conceived to:
- Interface robot’s motors to joint trajectory controller, from ros_control package.
- Create a controller manager, from controller_manager package, that provides the infrastructure to load, unload, start and stop controllers.
- Interface with motors calibration.
- Initialize motors parameters.
It belongs to the ROS namespace: /joints_interface/.
Parameters¶
Joints Interface’s default Parameters¶
| Name | Description | Default value | Unit |
|---|---|---|---|
ros_control_loop_frequency |
Controls loop frequency.
|
100 | Hz |
Joints Interface’s hardware specific Parameters¶
These parameters are specific to the hardware version (Ned, Niryo One or Ned2). This file comes in a different version for each hardware version. They are located in a directory of the hardware version name.
| Name | Description | Supported Hardware versions |
|---|---|---|
joint_N/id |
Joint N (1, 2, 3, 4, 5 or 6) id
Default: -1 (invalid id)
|
All versions |
joint_N/type |
Joint N (1, 2, 3, 4, 5 or 6) motor type among: “stepper”, “xl320”, “xl430”, “fakeStepper” or “fakeDxl”
Default: “”
|
All versions |
joint_N/bus |
Joint N (1, 2, 3, 4, 5 or 6) bus (“ttl” or “can”)
Default: “”
|
All versions |
| Name | Description | Default value | Unit | Supported Hardware versions |
|---|---|---|---|---|
calibration_timeout |
Waiting time between 2 commands during the calibration process.
|
30 | seconds | All versions |
calibration_file |
File path where is saved motors calibration value.
|
/home/niryo/niryo_robot_saved_files
/stepper_motor_calibration_offsets.txt
|
N.A. | All versions |
stepper_N/id |
Stepper N (1, 2 or 3) id
|
-1 (invalid id) | N.A. | All versions |
stepper_N/v_start |
Stepper N (1, 2 or 3) starting velocity for the acceleration profile
|
1 | 0.01 RPM | Ned 2 only |
stepper_N/a_1 |
Stepper N (1, 2 or 3) first acceleration for the acceleration profile
|
0 | RPM² | Ned 2 only |
stepper_N/v_1 |
Stepper N (1, 2 or 3) first velocity for the acceleration profile
|
0 | 0.01 RPM | Ned 2 only |
stepper_N/a_max |
Stepper N (1, 2 or 3) max acceleration for the acceleration profile
|
6000 | RPM² | Ned 2 only |
stepper_N/v_max |
Stepper N (1, 2 or 3) max velocity for the acceleration profile
|
6 | 0.01 RPM | Ned 2 only |
stepper_N/d_max |
Stepper N (1, 2 or 3) max deceleration for the acceleration profile
|
6000 | RPM² | Ned 2 only |
stepper_N/d_1 |
Stepper N (1, 2 or 3) last deceleration for the acceleration profile
|
0 | RPM² | Ned 2 only |
stepper_N/v_stop |
Stepper N (1, 2 or 3) stop velocity for the acceleration profile
|
2 | 0.01 RPM | Ned 2 only |
stepper_N/stall_threshold |
Stepper N (1, 2 or 3) stall threshold for which we detect
the end of the joint course for the calibration process
|
0 | N.A. | Ned 2 only |
stepper_N/direction |
Stepper N (1, 2 or 3) direction for the calibration
(1 = same as motor direction, -1 = against motor direction)
|
1 | N.A. | All versions |
stepper_N/delay |
Stepper N (1, 2 or 3) delay
|
0 | milliseconds | All versions |
| Name | Description | Unit | Supported Hardware versions |
|---|---|---|---|
dxl_N/offset_position |
Dynamixel N (1, 2 or 3) offset position for the zero position
Default: ‘0.0’
|
Rad | All versions |
dxl_N/home_position |
Dynamixel N (1, 2 or 3) home position
Default: ‘0.0’
|
Rad | All versions |
dxl_N/direction |
Dynamixel N (1, 2 or 3) direction (1 = ClockWise, -1 = Counter ClockWise)
Default: ‘1’
|
N.A. | All versions |
dxl_N/limit_position_max |
Dynamixel N (1, 2 or 3) maximal position allowed
Default: ‘0.0’
|
Rad | All versions |
dxl_N/limit_position_min |
Dynamixel N (1, 2 or 3) minimal position allowed
Default: ‘0.0’
|
Rad | All versions |
dxl_N/position_P_gain |
Dynamixel N (1, 2 or 3) Proportional gain of the position PID controller
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/position_I_gain |
Dynamixel N (1, 2 or 3) Integral gain of the position PID controller
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/position_D_gain |
Dynamixel N (1, 2 or 3) Derivative gain of the position PID controller
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/velocity_P_gain |
Dynamixel N (1, 2 or 3) Proportional gain of the velocity PID controller
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/velocity_I_gain |
Dynamixel N (1, 2 or 3) Integral gain of the velocity PID controller
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/FF1_gain |
Dynamixel N (1, 2 or 3) Feed Forward velocity Gain
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/FF2_gain |
Dynamixel N (1, 2 or 3) Feed Forward acceleration Gain
Default: ‘0.0’
|
N.A. | All versions |
dxl_N/acceleration_profile |
Dynamixel N (1, 2 or 3) acceleration profile parameter [*]
Default: ‘0.0’
|
RPM² | All versions |
dxl_N/velocity_profile |
Dynamixel N (1, 2 or 3) velocity profile parameter
Default: ‘0.0’
|
RPM | All versions |
| [*] | refers to the dedicated motor reference documentation. |
| Name | Description | Unit | Supported Hardware versions |
|---|---|---|---|
stepper_N/id |
Stepper N (1, 2 or 3) id
Default: -1 (invalid id)
|
N.A. | All versions |
stepper_N/gear_ratio |
Stepper N (1, 2 or 3) gear ratio
Default: 1
|
N.A. | Ned and One only |
stepper_N/max_effort |
Stepper N (1, 2 or 3) max effort
Default: 0
|
N.A. | Ned and One only |
stepper_N/motor_ratio |
Stepper N (1, 2 or 3) motor ratio for conversion into radian
Default: 1
|
N.A. | Ned 2 only |
stepper_N/offset_position |
Stepper N (1, 2 or 3) offset position to position limit min
Default: 0
|
Rad | All versions |
stepper_N/home_position |
Stepper N (1, 2 or 3) Home position of the motor
Default: 0
|
Rad | All versions |
stepper_N/limit_position_min |
Stepper N (1, 2 or 3) position limit min of the motor
Default: 0
|
Rad | All versions |
stepper_N/limit_position_max |
Stepper N (1, 2 or 3) position limit max of the motor
Default: 0
|
Rad | All versions |
stepper_N/direction |
Stepper N (1, 2 or 3) assembly direction of the motor (1 = CW, -1 = CCW)
Default: 1
|
N.A. | All versions |
stepper_N/v_start |
Stepper N (1, 2 or 3) starting velocity for the acceleration profile
Default: 1
|
RPM | Ned 2 only |
stepper_N/a_1 |
Stepper N (1, 2 or 3) first acceleration for the acceleration profile
Default: 0
|
RPM² | Ned 2 only |
stepper_N/v_1 |
Stepper N (1, 2 or 3) first velocity for the acceleration profile
Default: 0
|
RPM | Ned 2 only |
stepper_N/a_max |
Stepper N (1, 2 or 3) max acceleration for the acceleration profile
Default: 6000
|
RPM² | Ned 2 only |
stepper_N/v_max |
Stepper N (1, 2 or 3) max velocity for the acceleration profile
Default: 6
|
RPM | Ned 2 only |
stepper_N/d_max |
Stepper N (1, 2 or 3) max deceleration for the acceleration profile
Default: 6000
|
RPM² | Ned 2 only |
stepper_N/d_1 |
Stepper N (1, 2 or 3) last deceleration for the acceleration profile
Default: 0
|
RPM² | Ned 2 only |
stepper_N/v_stop |
Stepper N (1, 2 or 3) stop velocity for the acceleration profile
Default: 2
|
RPM | Ned 2 only |
stepper_N/stall_threshold |
Stepper N (1, 2 or 3) stall threshold for which we detect the end of the joint course
Default:
|
N.A. | Ned 2 only |
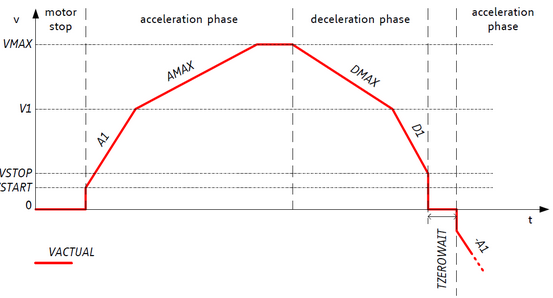
The velocity profiles for the Stepper motors (in calibration_params.yaml and steppers_params.yaml files) can be defined for TTL bus only (thus for Ned2 only). They are defined according to the following graph:
Services, Topics and Messages¶
Subscribed topics¶
| Name | Message Type | Description |
|---|---|---|
niryo_robot_follow_joint_trajectory_controller/follow_joint_trajectory/result |
:control_actions:`control_msgs/FollowJointTrajectory Action<FollowJointTrajectory>` | Trajectory results from controller |
Published topics¶
| Name | Message Type | Description |
|---|---|---|
/niryo_robot/learning_mode/state |
std_msgs/Bool | Learning mode state |
Services¶
| Name | Message Type | Description |
|---|---|---|
/niryo_robot/joints_interface/calibrate_motors |
SetInt | Starts motors calibration - value can be 1 for auto calibration, 2 for manual |
/niryo_robot/joints_interface/request_new_calibration |
Trigger | Resets motor calibration state to “uncalibrated”. This will allow the user to ask a new calibration. |
niryo_robot/learning_mode/activate |
Trigger | Changes learning mode (Free Motion) state. When learning mode is activated, torques are disabled and the joints can move freely. |
niryo_robot/joints_interface/steppers_reset_controller |
Trigger | Resets the controller |
Errors and warning messages¶
| Type | Message | Description |
|---|---|---|
| Error | JointHardwareInterface::init - Fail to add joint, return : | The joint is not correctly initialized |
| Error | JointHardwareInterface::init - stepper state init failed | The stepper state parameters are not correctly retrieved |
| Error | JointHardwareInterface::init - dxl state init failed | The dynamixel state parameters are not correctly retrieved |
| Error | JointHardwareInterface::init - Dynamixel motors are not available on CAN Bus | The robot wrongly tries to initialize a dynamixel motor for the CAN bus (works only on TTL) |
| Error | JointHardwareInterface::init - Fail to reboot motor id | The motor failed to reboot. Try rebooting it again |
| WARNING | JointHardwareInterface::init - initialize stepper joint failure, return %d. Retrying | Failed to initialize a stepper. Will try again up to 3 times |
| WARNING | JointHardwareInterface::init - add stepper joint failure, return %d. Retrying | Failed to add a stepper joint. Will try again up to 3 times |
| WARNING | JointHardwareInterface::init - init dxl joint failure, return : %d. Retrying | Failed to initialize a dynamixel joint. Will try again up to 3 times |
| WARNING | JointHardwareInterface::init - add dxl joint failure, return : %d. Retrying | Failed to add a dynamixel joint. Will try again up to 3 times |