
Common¶
Model¶
The model subpackage is comprised of:
States¶
Classes, to represent the virtual state of each hardware component at any moment. The hierarchy allows powerful polymorphism so that we can interpret each component differently based on the information we need to obtain.
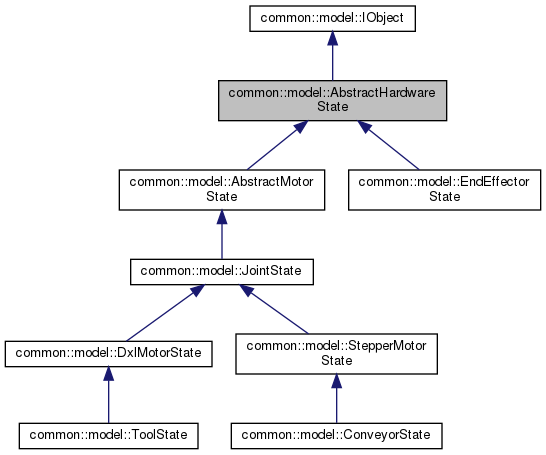
Abstract Hardware State inheritance graph
Enums¶
Enhanced enums, to keep trace of various enumeration and be able to have useful utilities attached to them (like conversion in string).
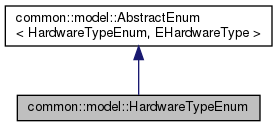
Hardware Type Enum inheritance graph
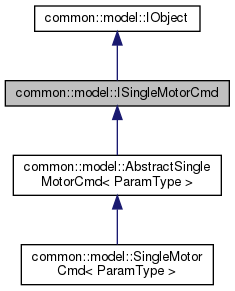
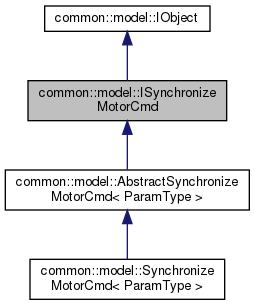
Commands¶
Classes representing single and synchronize commands, for steppers and dynamixels. They are needed in queues in the ttl_driver and can_driver packages.
 |
 |
|---|---|
| Single Cmd | Sync Cmd |
Each type of command is an alias to specified versions of two base template classes: AbstractSynchronizeMotorCmd and AbstractSingleMotorCmd
Util¶
The util subpackage is comprised of:
- Cpp interfaces, used globally in the stack for polymorphism for instance
- Utility functions usable globally in the stack
Dependencies¶
This package does not depend on any package. This package is a dependency of the following packages:
- can_driver
- conveyor_interface
- cpu_interface
- end_effector_interface
- joints_interface
- niryo_robot_hardware_interface
- tools_interface
- ttl_driver