
Electrical interface
Back Panel interface
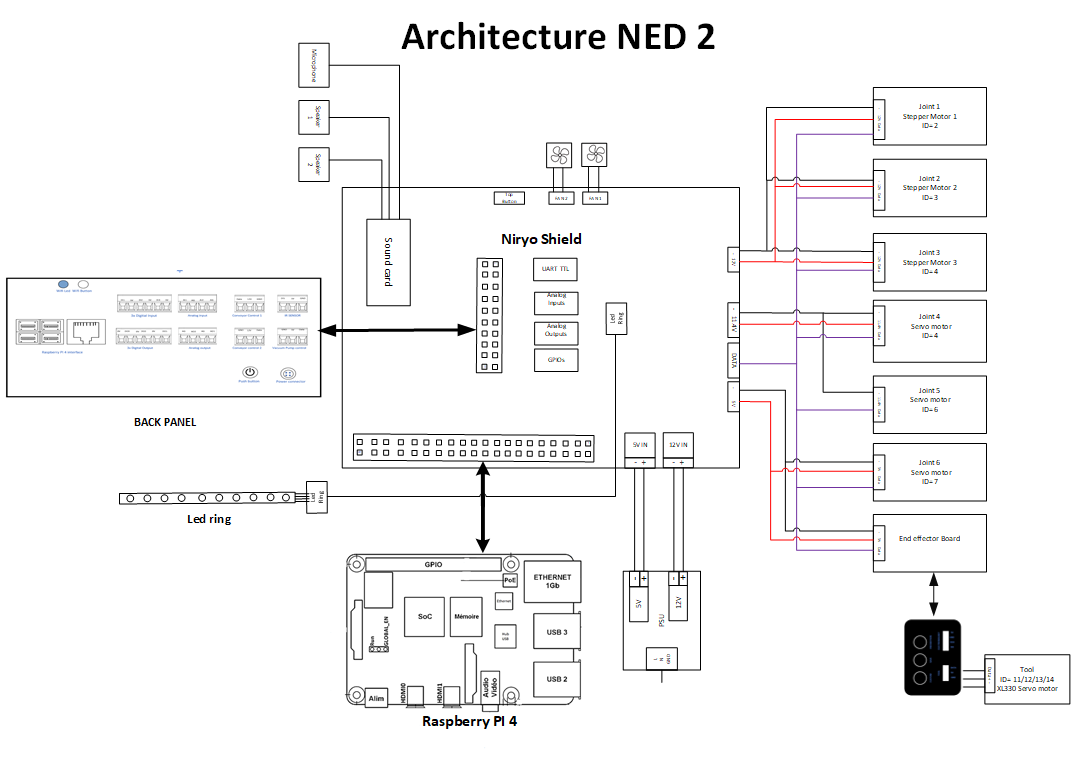
Ned2 comes with I/O interface that can be used for wide range of equipements and Ned2 ecosystem.
The illustration below shows the differents electrical and communication interfaces present of the back panel of the robot.

1 |
2 x USB 2.0 |
2 |
2 x USB 3.0 |
3 |
RJ45 port |
4 |
Wi-Fi status indicator |
5 |
Wi-Fi button |
6 |
3 x digital inputs |
7 |
3 x digital outputs |
8 |
2 x analog inputs |
9 |
2 x analog outputs |
10 |
Conveyor control interface |
11 |
Conveyor control interface |
12 |
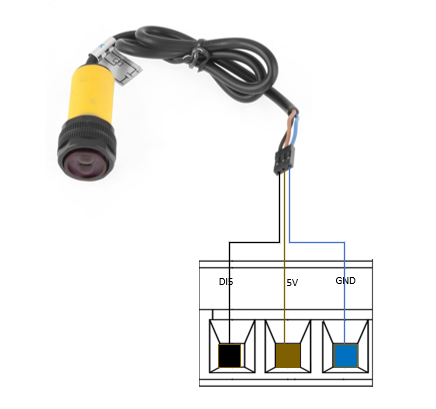
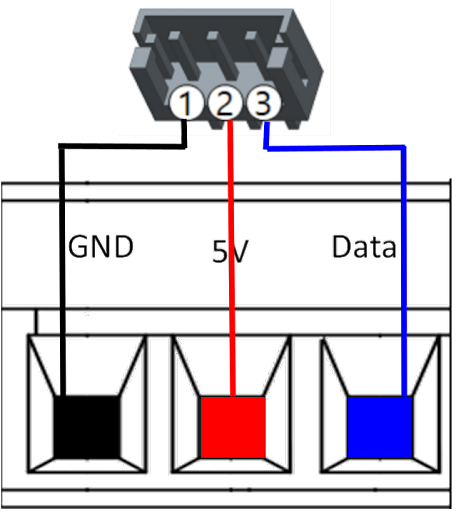
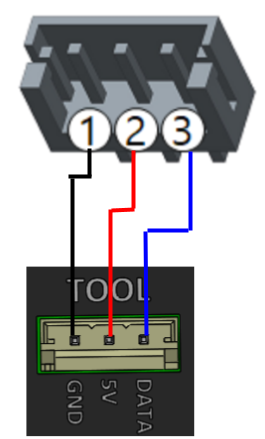
Infrared sensor interface |
13 |
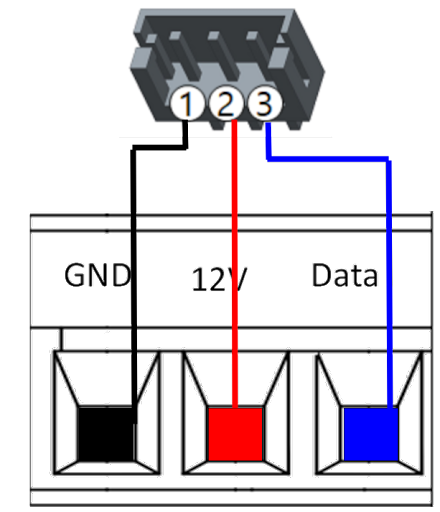
Vacuum pump control interface |
14 |
On/off button |
15 |
General power input |
Warning
Take great care in following the safety guidelines in the next section to avoid damaging the robot.
Be sure to respect the order of connection and the characteristics of the robot’s inputs/outputs.
Make sure all the equipment and cables are dry. If water gets into the equipment, unplug the power cable.
Do not unplug or turn off the robot while it is in use, as this could damage the robot’s Raspberry Pi 4 or the micro SD card inside.
Before plugging in or unplugging the power supply, be sure to turn off the robot.
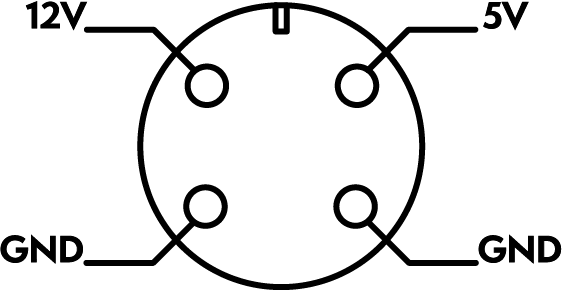
General power input
Ned2 is powered with AC/DC adapter with two output ratings: 12V and 5V
Settings |
Value |
|---|---|
Frequency |
50/60 Hz |
Input |
AC 100-240 V , 2.5 A |
Output |
12 V – 7 A; 5 V – 7 A |
On/Off button
The robot is turned on by pressing the power button on the back panel.
When the robot is starting on , the led ring displays white light.
After the robot start up completed, the indication of led ring will display blue light, the robot can be used normally at this time.
The robot is turned off by pressing the same power button on the back panel.
When pressing the button ,the robot will start the Shutdown sequence. The led ring will display white Breath for 2 seconds.
Warning

Make sure the robot is in home position when powering off or on the robot.
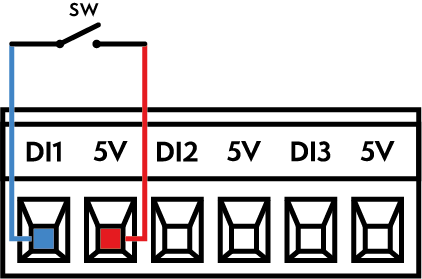
Digital inputs
The electrical specifications of the digital inputs are showen below:
Connector |
Settings |
Min |
Max |
Units |
|---|---|---|---|---|
Digital inputs: Type –> NPN |
||||
[ DI1 - DI2 -DI3 ] |
Voltage |
0 |
5 |
V |
Current |
0 |
5 |
mA |
|
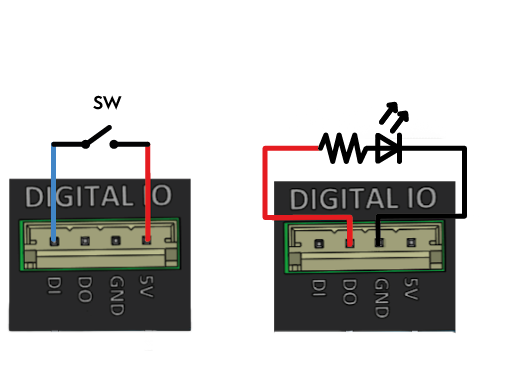
This illustration below shows how to connect a switch to a digital input.
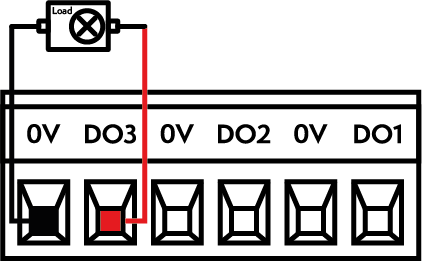
Digital outputs
The electrical specifications of the digital outputs are showen below:
Connector |
Settings |
Min |
Max |
Units |
|---|---|---|---|---|
Digital outputs: Type –> PNP |
||||
[ DO1 - DO2 -DO3 ] |
Voltage |
0 |
5 |
V |
Current |
0 |
250 |
mA |
|
This example shows how to connect a load in order to be controlled from a digital output.
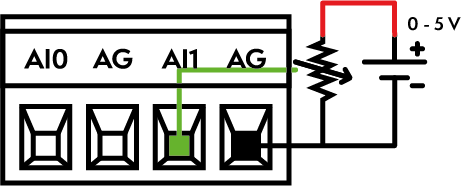
Analog inputs
The analog inputs can be used to measure voltage ( 0-5V) form an external equipement.
The electrical specifications are shown below:
Connector |
Settings |
Min |
Max |
Units |
|---|---|---|---|---|
Analog input |
||||
[ AI1 - AI2 ] |
Voltage |
0 |
5 |
V |
Current |
0 |
20 |
mA |
|
Resolution |
12 |
bit |
||
This illustration below shows how to connect a potentiometer for reading values from 0-5V.
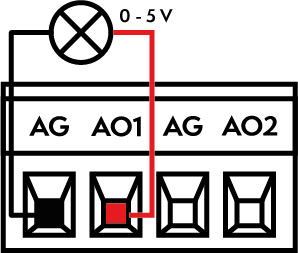
Analog outputs
The analog outputs can be used to set voltage ( 0-5V) to an external equipement.
The electrical specifications are shown below:
Connector |
Settings |
Min |
Max |
Units |
|---|---|---|---|---|
Analog output |
||||
[ AO1 - AO2 ] |
Voltage |
0 |
5 |
V |
Current |
0 |
30 |
mA |
|
Resolution |
12 |
bit |
||
This example shows how to connect a load in order to be controlled from an analog output.
Conveyor control interfaces
Advice

Please refer to the conveyor v2 documentation for more information.
Infrared sensor interface
Vacuum pump control interface
Wi-Fi mode
The Wi-Fi indicator is used to display the Wi-Fi status in the robot.
Color |
Description |
Trigger |
|---|---|---|
Solid blue |
The robot is hotspot mode |
Hotspot activated using Niryo Studio or the Wi-Fi button |
2 blue blinks followed by a pause |
The robot is connected to a network |
The robot is connected to the network either with an Ethernet cable or via Wi-Fi |
Quick blinking blue light |
Wi-Fi mode change in progress |
Press the Wi-Fi button |
LED off |
The robot’s hotspot and Wi-Fi are not activated |
In order to activate a mode, you must press the Wi-Fi button |
Wi-Fi button
Function |
Type of action |
Condition |
Status after action |
|---|---|---|---|
Activate the hotspot |
Short press |
The robot is in a Wi-Fi mode |
The robot is in hotspot mode |
Activate the Wi-Fi |
Short press |
The Wi-Fi is not activated or the robot is in hotspot mode |
The robot is in a Wi-Fi mode |
Deactivate the hotspot and wifi |
Long press |
The Wi-Fi or hotspot mode is activated |
The Wi-Fi (and hotspot) are disabled |
Top button
The top button on the Ned2 has multiple functions, depending on how long your press on it or the number of presses.
Time/Number of presses |
Function |
|---|---|
A program is running |
|
1 short press (0.1 and 2 seconds) |
Pauses the program |
1 long press (> 2 seconds) |
Stops the program |
A program is paused |
|
1 short press (0.1 and 2 seconds) |
Resumes the program where it left off |
1 long press (> 2 seconds) |
Stops the program |
A program is defined with an automatic start |
|
1 short press (0.1 and 2 seconds) |
Starts a saved program |
Control Panel

FreeMotion button
Pressing and holding this button deactivates the torques in the motors and performs the FreeMotion operation (find out more information on operation mode section.
Save button
A short press on this button saves the robot’s position on Niryo Studio.
Custom button
This button is programmable and allows the user to choose the type of action and the function of the button.
For more information, please refer to Niryo Studio documentation
Gripper connector
This connector is used to control the Custom Gripper, Large Gripper or Adaptive Gripper.
Electromagnet connector
This connector is specifically for connecting Niryo’s electromagnet.
There is also a digital input for connecting a sensor, for example.
Programming the input/output can be done through Niryo Studio.
Connector |
Settings |
Min |
Max |
Units |
|---|---|---|---|---|
Digital inputs: Type –> PNP |
||||
[ DO4] |
Voltage |
0 |
5 |
V |
Current |
0 |
250 |
mA |
|
Digital inputs: Type –> NPN |
||||
[ DI4] |
Voltage |
0 |
5 |
V |
Current |
0 |
5 |
mA |
|
Safety box
The safety box contain the emergency stop. Activate the emergency stop button to immediately stop all robot motion.

Warning

The safety box should be always be wired to the robot.
Electrical connection
Powering ON
To turn on the robot, make the connection as explained above. Make sure that the emergency stop button is deactivated and that the robot is installed according to the instructions given in the Safety instructions chapter.
Press the On button and wait a few moments for the LED ring to light up ( please refer to led ring section).
Find more information on how to program and use the robot in the Niryo Studio manual.
Advice
- Hardware can be tested for the very first time without using any software, as a program is pre-recorded at the factory to start automatically. To do this, follow the steps below:
Make the electrical connection and switch on the robot as explained above
Wait until the LED ring performs a slow blue “Chase” (go to the led ring section) and the robot start-up sound starts (if this is the first time you are using the Ned2, it takes about two minutes)
Press the top button: the Ned2 will start with a calibration, then it will perform a pre-recorded sequence.
LED ring indications
Warning
If software changes are made to the robot LED ring indications, then the indications given in this section may be wrong.
Color |
Condition |
Operating mode |
Description |
Troubleshooting |
|---|---|---|---|---|
White Breath |
Normal condition |
Robot is booting |
N/A |
|
White to blue Breath |
Normal condition |
Starting the robot |
N/A |
|
Slow blue Chase |
Normal condition |
Manual mode - Calibration |
Calibration required |
Press the Custom button, or launch a calibration |
Blue Snake |
Normal condition |
Manual mode - Calibration |
Calibration in progress |
N/A |
3 yellow Flashing |
Normal condition |
Manual mode - Calibration |
Calibration warning |
N/A |
Solid orange |
Warning |
Manual mode |
One or more robot axes are outside the motion limits |
Return the axes to within the limits and start a calibration. |
1 white Breath lasting 2 seconds then 6 blinks in white |
Normal condition |
Manual mode |
Shutdown in progress |
N/A |
Flashing red |
Emergency |
Manual mode |
Motor error |
Check the motor error codes in the “Hardware Status” panel of Niryo Studio. |
Solid white |
Normal condition |
Update in progres |
N/A |
|
Breath blue |
Normal condition |
Manual mode - FreeMotion |
FreeMotion activated |
N/A |
Breath green |
Normal condition |
Manual mode |
FreeMotion disabled |
N/A |
Solid green |
Normal condition |
Manual mode - Programming |
Program running |
N/A |
Chase green |
Normal condition |
Manual mode - Programming |
Program paused |
A short press on the button to resume, a long press on the top button to cancel the current program |
Chase orange |
Warning |
Manual mode - Programming |
Error in the program |
Check the logs on Niryo Studio |
Solid red |
Emergency |
Fatal error |
Check the logs on Niryo Studio and restart the robot |
|
Flashing orange |
Warning |
A collision is detected |
Perform a new action to remove the warning and check if the robot has collided with an obstacle |
|
Flashing purple |
Normal condition |
Manual mode |
Login to Niryo Studio |
N/A |
1 Flashing white |
Normal condition |
Manual mode – programming |
Saving a position |
N/A |
Note

- Glossary of light indications:
Breath: The light intensity increases and decreases periodically, suggesting a breath.
Snake: The LED chaser runs through the LEDs at moderate speed. Several LEDs light up one after the other.
Chase: Every third LED is on. All of them shift across, one LED after another.
Animation |
Appearance |
Gif |
|---|---|---|
None |
LEDs are turned off |
|
Solid |
Set the whole LED Ring to the same color at once |
|
Flashing |
Flashes a color according to a frequency
|
|
Alternate |
The different colors are alternated one after the other.
|
|
Chase |
Movie theater light style chase animation.
|
|
Rainbow |
Draws rainbow that fades across all LEDs at once.
|
|
Breath |
Variation of light intensity to imitate breathing.
|
|
Snake |
Luminous snake that turns around the LED Ring.
|
|
Note
In order to program the different electrical interfaces of the robot , please refer to Niryo Studio Documentation.