
Installation and commissioning
This section specifies the procedures to follow during unpacking and transportation.
Transport
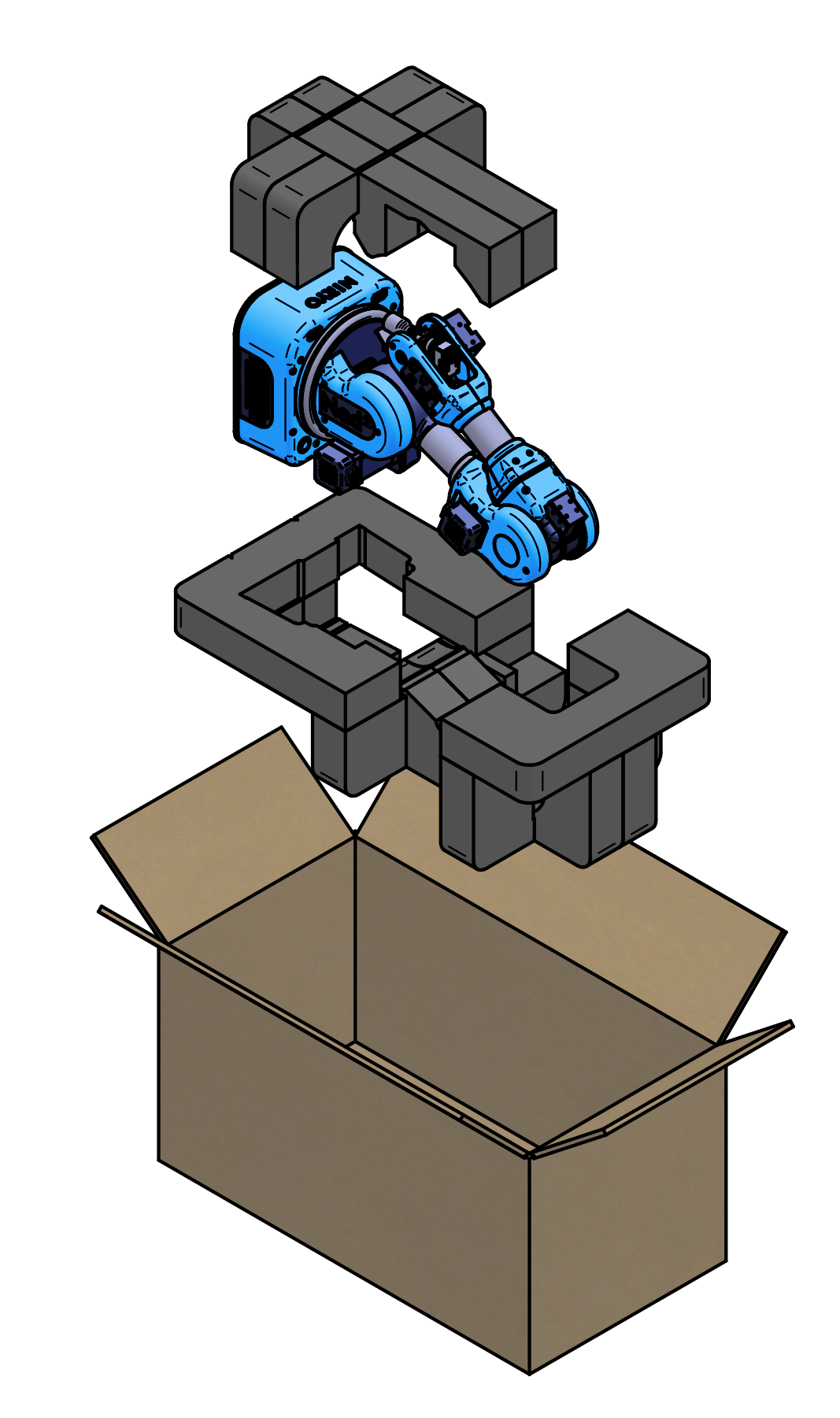
Be sure to transport the robot in its original box to avoid damage.
Warning

Maintain good posture when handling the arm or arm cartons to avoid back injuries.
What the box contains
When you order Ned2 you receive a box with the following items:
1x Ned2 Robot
1x Custom Gripper
1x Power supply
1x Safety box
2x Analog I/O connector
2x Digital I/O connector
1x Universal travel plug adapter
1x SD card reader
1x manual instruction
1x Quickstart

Intended use
The Ned2 robot is intended for educational, and research and development purposes, i.e.:
learning robotics;
research and development in robotics;
simulation and prototyping of complete industrial scenarios such as “Pick & Place” (take an object to move it), “Pick & Pack” (take an object to insert it into a packaging);
hardware application: connect and control the robot with sensors and external actuators in order to simulate an application, while respecting the conditions defined in this instruction manual.
The operations below do not comply with the uses set by Niryo. They include:
use as a children’s toy;
use for industrial tasks;
use for handling inappropriate objects (with unsuitable grippers, objects whose mass is greater than the maximum authorized load);
use that exceeds the stated specifications.
Any use of the robot and its ecosystem that does not comply with the uses initially intended by Niryo must be expressly authorized by Niryo.
Unpacking and installation
Inspect Ned2’s packaging to make sure that nothing is damaged;
Remove the packaging and make sure that the product has not been damaged in any way and that nothing has been mislaid during transport;
Put Ned2 in a location that has been specifically allocated to its use;
Pay attention to the commissioning and safety instructions.
Warning
Maintain good posture when handling the arm or arm cartons to avoid back injuries.
Make sure the robot is handled correctly so that the arm cannot fall during packing, loading, unloading or unpacking. Handling areas are provided to facilitate the transport of the robot (see below).
Make sure that the robot is handled correctly so that hands cannot get caught in the joints. To do this, respect the handling zones specified below.
Robot handling area
