
Setup
Control mode |
Description |
|---|---|
Robot control mode |
The Conveyor Belt (v2) is controlled by a Niryo robot. |
External control box |
The Conveyor Belt (v2) is controlled by the external control box to vary speed and direction. |
Warning

A risk assessment must be carried out before any use of the Conveyor Belt (v2) in both modes.
Note

Check the compatibility of the Conveyor Belt (v2) with the Niryo robot range.
For more information, contact the Niryo support service.
Control with the Ned or the Niryo One
The Conveyor Belt (v2) communicates with the Ned via the TTL Bus.
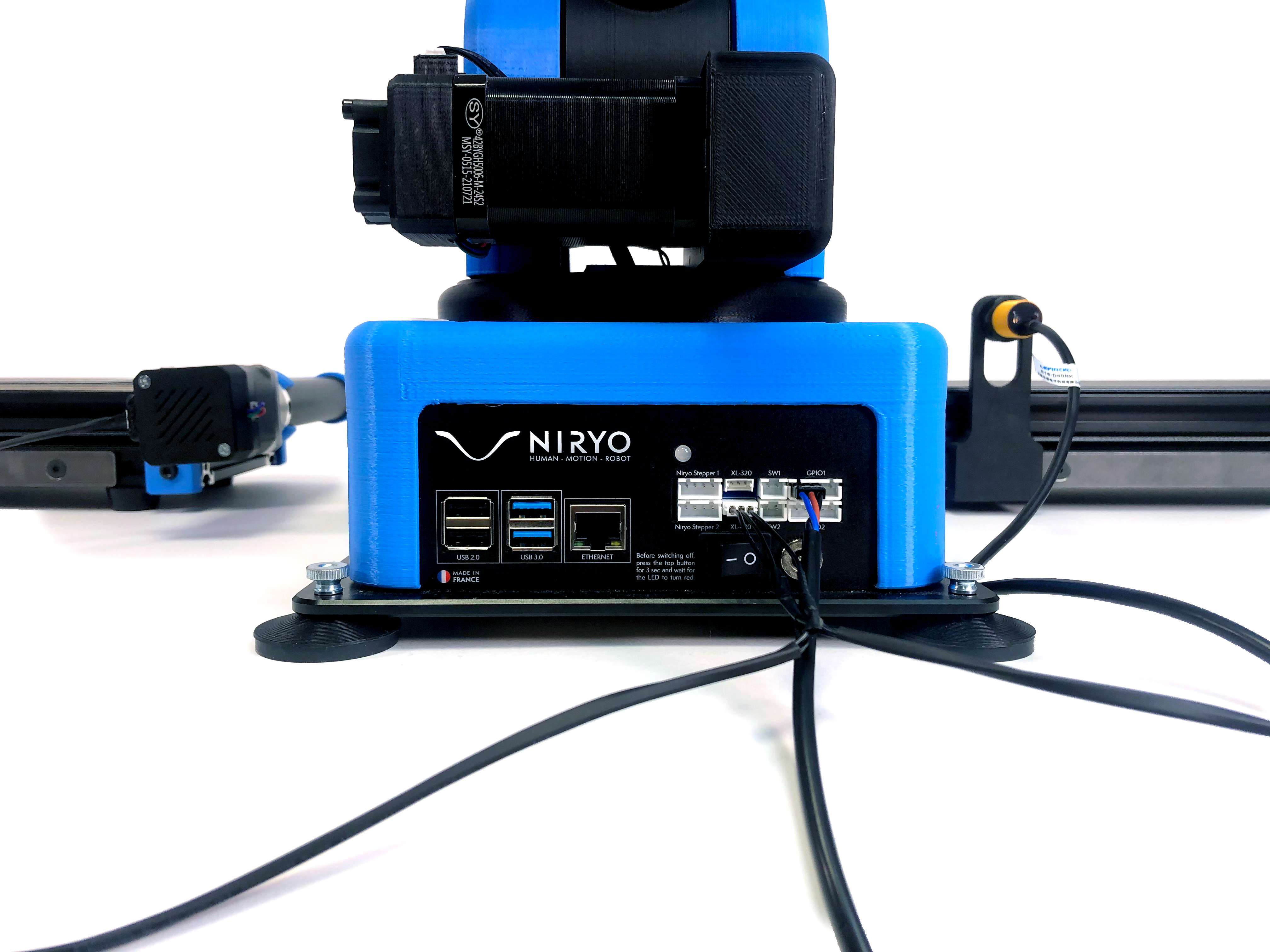
To use the Conveyor Belt (v2) with Ned, connect the robot control connector on the motor side of the Conveyor Belt (v2) (connector 1 see Conveyor electrical interface (v2)) on the back of the Ned on port C (see illustration below).
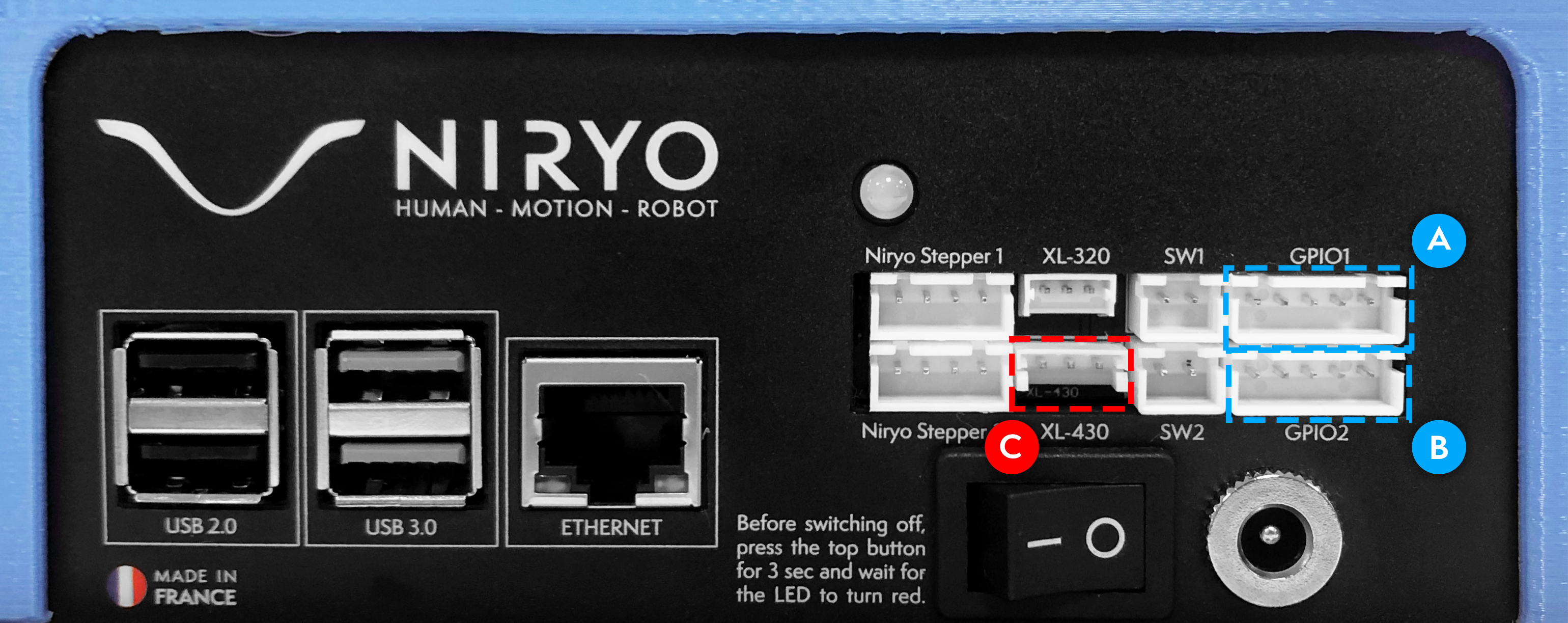
To use the infrared sensor with the Conveyor Belt (v2) and Ned, connect it to the adapter provided for Ned, and plug the adapter into the back of the robot (Port A or B).
Be sure to follow the order of the connectors to avoid a short circuit between the GND, 5V and other GPIO pins.
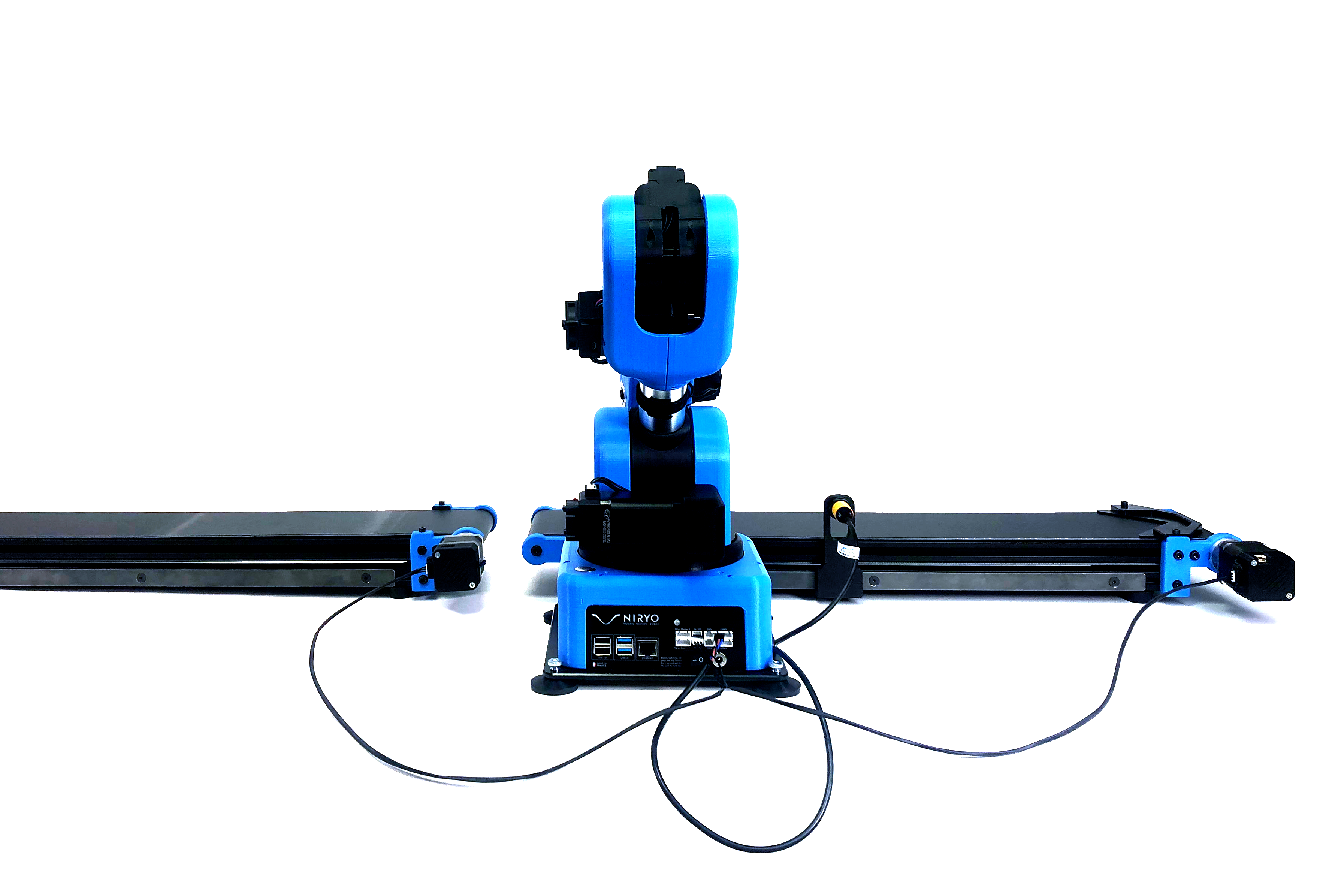
In the example below, two Conveyor Belt (v2) and an infrared sensor are connected to Ned.
Control with Ned2
The Conveyor Belt (v2) communicates with Ned2 via the TTL Bus.
To use the Conveyor Belt (v2) with Ned2, connect the robot control connector on the motor side of the Conveyor Belt (v2) (connector 1 in Conveyor electrical interface (v2)) on the back of Ned2 on port A or B. (see illustration below).

To use the infrared sensor with the Conveyor Belt (v2) and the robot, connect the sensor to the back of Ned2 (Port C).
Please refer to the online documentation for more details on the control system of the Conveyor Belt (v2).
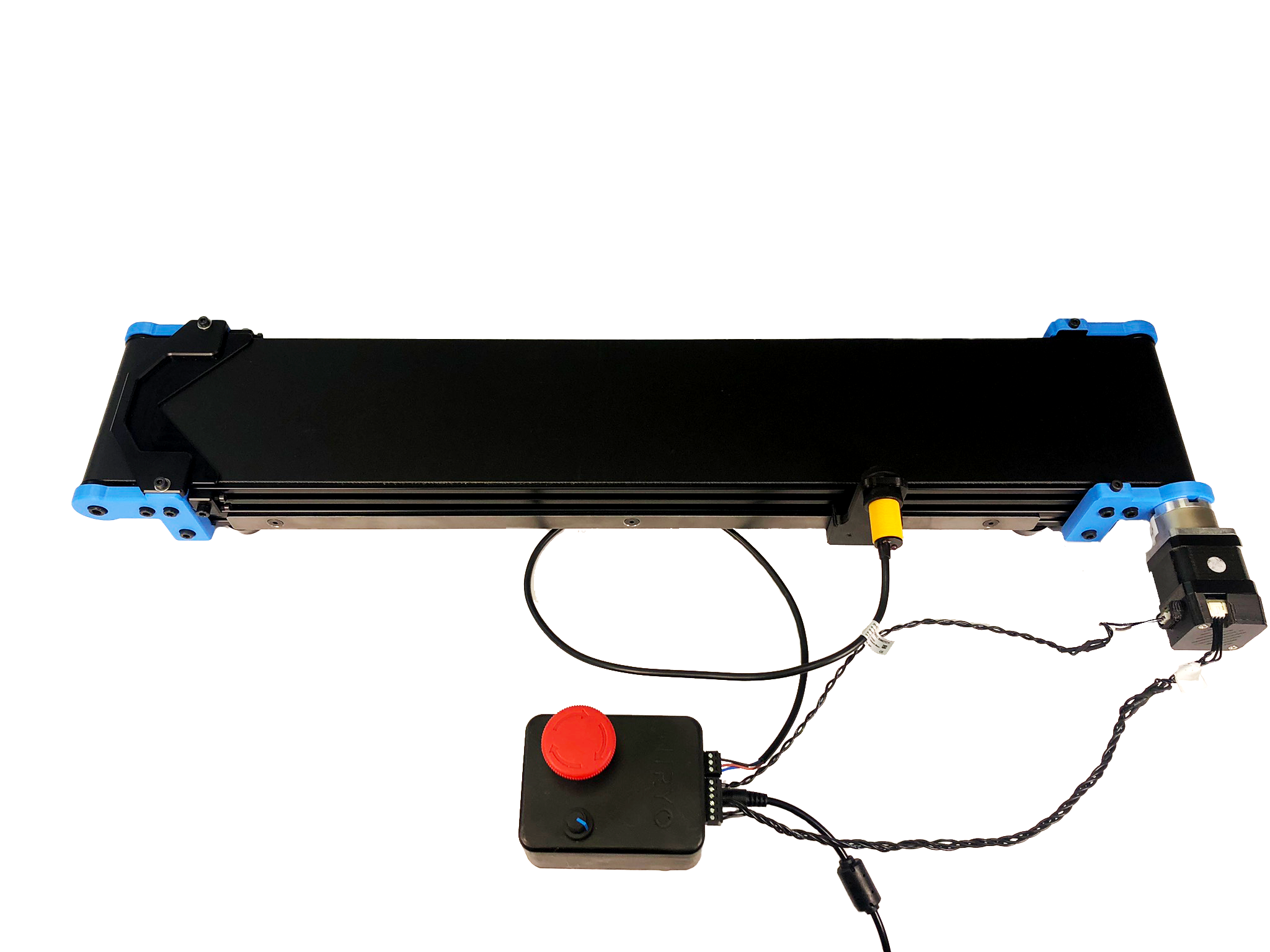
Control with control box
The Conveyor Belt (v2) can be controlled using an optional control box.

Please connect the C1 to the robot control connector of the Conveyor Belt (v2) (1) and the C2 to the standalone controller connector (2) on the Conveyor Belt (v2) side; then connect the C0 to the control box (1).

Connect the IR sensor to the connector (2) of the Control box if necessary.

Connect the power supply to the connector (5).
Warning
Follow the order of connection of the control box to avoid any damage.
Activate the emergency stop button in emergency or abnormal situation.
Note
Please refer to the how to use chapter for more information on how to us the Conveyor Belt (v2)’s control box.
The control box is optional and is sold separately from the Conveyor Belt (v2).
Contact our sales team for further information.