
Electrical interface
Conveyor Belt (v2) electrical interface

1 |
Interface: Robot control connector |
2 |
Interface: External control box connector |
Control box electrical interface

1 |
Conveyor Belt (v2) control connector |
To connect the conveyor to the control box. |
2 |
Sensor connector |
To connect the Infrared sensor to the control box. |
3 |
Rotary potentiometer |
To control the speed and direction of the Conveyor Belt (v2). |
4 |
Emergency stop |
To stop the conveyor and cut power supply. |
5 |
Genral power input |
To supply voltage to the connveyor and the control box. |
Infrared sensor
This infrared device can detect an object at a given distance. This distance can be adjusted between 6 and 80 cm.
To get more information about the sensor and to set up the distance detection, please refer to this document.
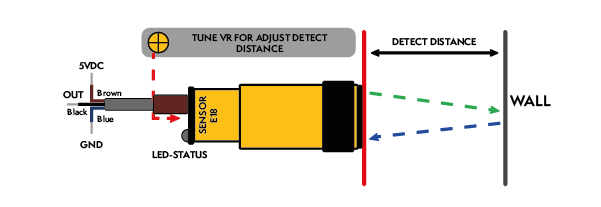
- When the distance of the sensor < adjusted distance: an obstacle/object is detected.
The LED lights up,
The output is set to 0.
- When the distance of the sensor > adjusted distance: no obstacle/object is detected.
The LED lights off,
The output is set to 1.