Mechanical interface
Mechanical Overview
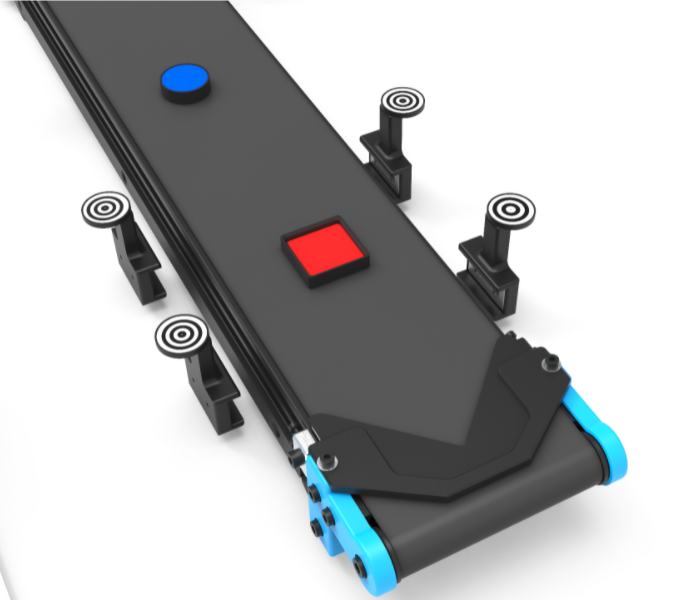
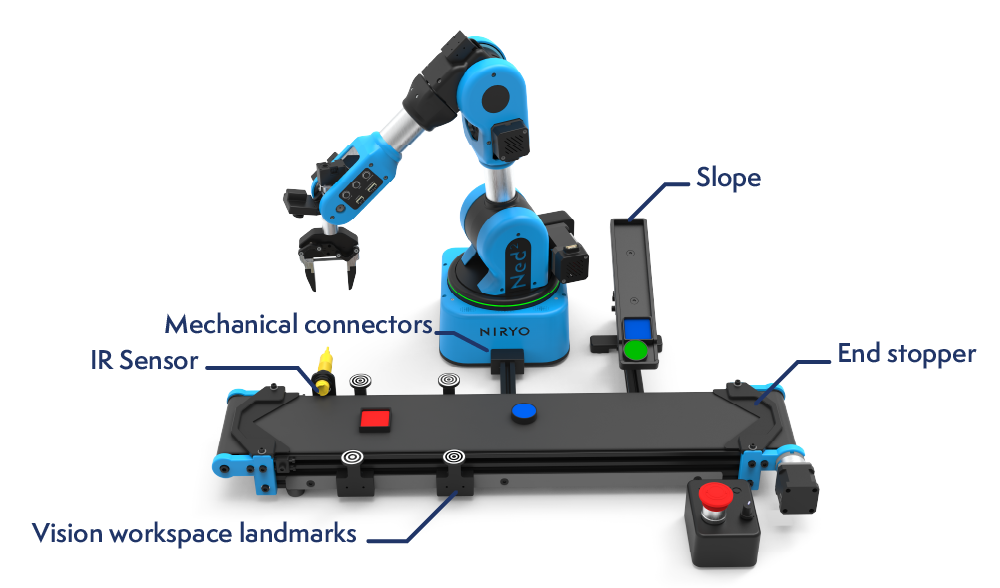
This chapter introduces the mechanical interfaces of the Conveyor Belt (v2) which is composed of:
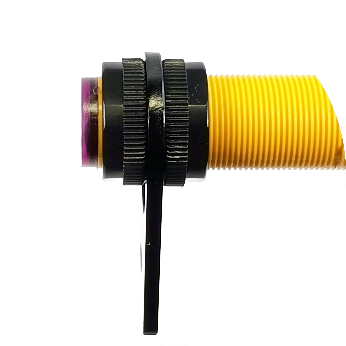
IR sensor
Vision workspace landmarks
End stopper
Slope
Mechanical connectors
The environment is illustrate as follow.
Installation
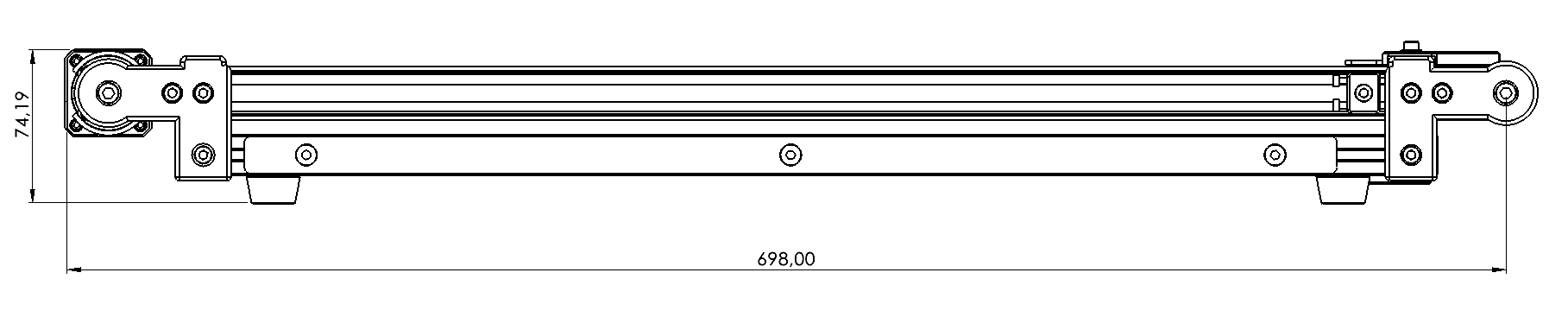
The Conveyor Belt (v2) must be placed on a table or flat surface that is larger than the surface of its support unit to prevent the product from falling.

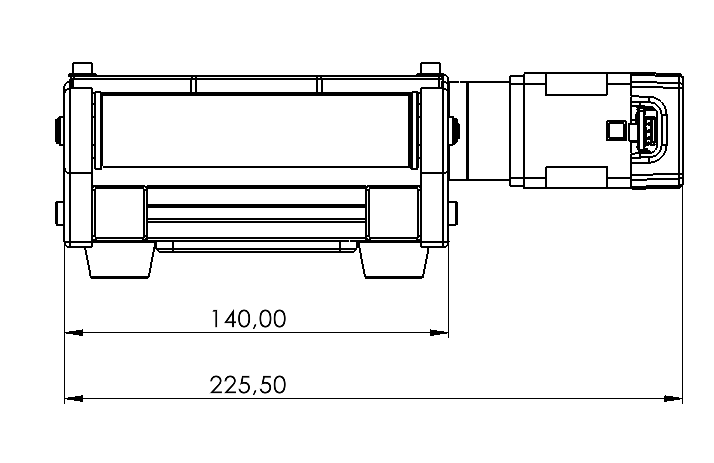
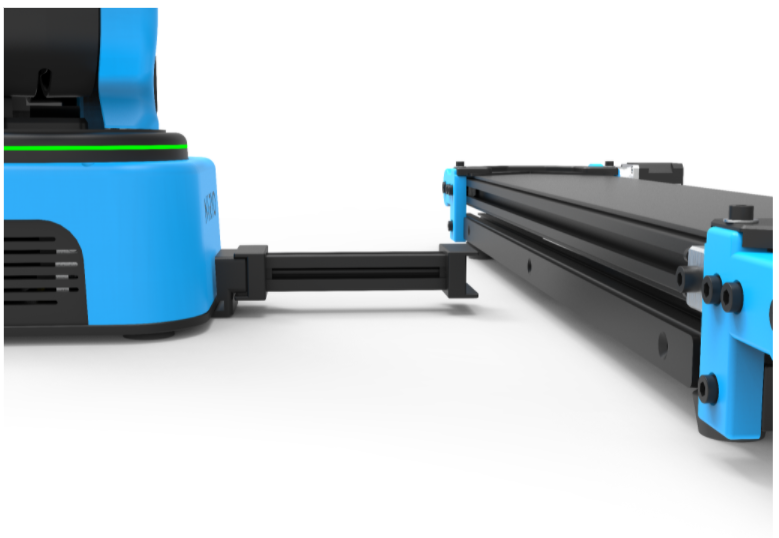
Mechanical Connectors
The conveyor’s ecosystem is easy and quick to install thanks to magnetic mechanical connectors.
Magnetic mechanical connectors give you a stable and precise environment by connecting your Conveyor Belt (v2) and your Ned2. You will need to screw the first part on the robot and then link the robot to the conveyor with the magnetic mechanical connectors, as illustrated on the following pictures.

The slope allows the robot to perform sequences in a rough environment while ensuring stability thanks to the magnetic connection to the conveyor. You can also use the slope freely.

Vision workspace landmarks are also easy to use and easy to move. They allow you to work on the entire length of the conveyor.