
Control Ned/Ned2 with MoveIt and ROS Multi-Machines
V.1.1

Difficulty: easy
Time: ~10 min
Note
- This tutorial is working from:
- The version v3.2.0 of the ned_ros_stack
This tutorial explains how to control Ned/Ned2 with Rviz through the MoveIt plugin, in Multi-machines.
Before going further, please refer to our Multi-machines, and our Connect to Ned via SSH tutorials. You can also refer to the ROS Multi-machines tutorial: Running ROS across multiple machines.
What you will need
A Ned (or a Ned2),
A computer with Ubuntu (we used Ubuntu 18.04),
To have Rviz installed on your computer,
To have the niryo_robot_bringup ROS package on your computer, a part of the Ned/Ned2 ROS Stack that you can download here.
Setup
In each terminal you’ll use, you have to setup the ROS_MASTER_URI and ROS_IP environment variables. The master is hosted on Ned/Ned2.
Hint
We recommend to use an ethernet connection between your computer and Ned to optimize the communication speed.
On Ned/Ned2
First, in a terminal, connect to Ned/Ned2 in SSH, with the command line:
ssh niryo@<ned_static_ip_address>
We use the hardware_interface_standalone.launch file, which only launches on Ned/Ned2:
The Hardware Stack (which publishes on the /joint_state topic), with the motor’s drivers,
The controllers,
The robot description (loads the urdf file of the robot),
The robot state publisher.
Launch it on Ned/Ned2 with:
roslaunch niryo_robot_hardware_interface hardware_interface_standalone.launch
On your computer
We use the moveit_multimachines.launch file, which launches:
The command validation group (which checks that commands are not out of bounds)
The Moveit! move group interface
This file is in the niryo_robot_bringup package on the Ned/Ned2 ROS Stack. Launch it with:
roslaunch niryo_robot_bringup moveit_multimachines.launch
Finally, in a third terminal, launch Rviz with:
rosrun rviz rviz
Control Ned/Ned2 through Rviz
After opening Rviz, make sure that the “fixed frame” is set to “world”. Add the MotionPlanning to the visualization. You should now have:
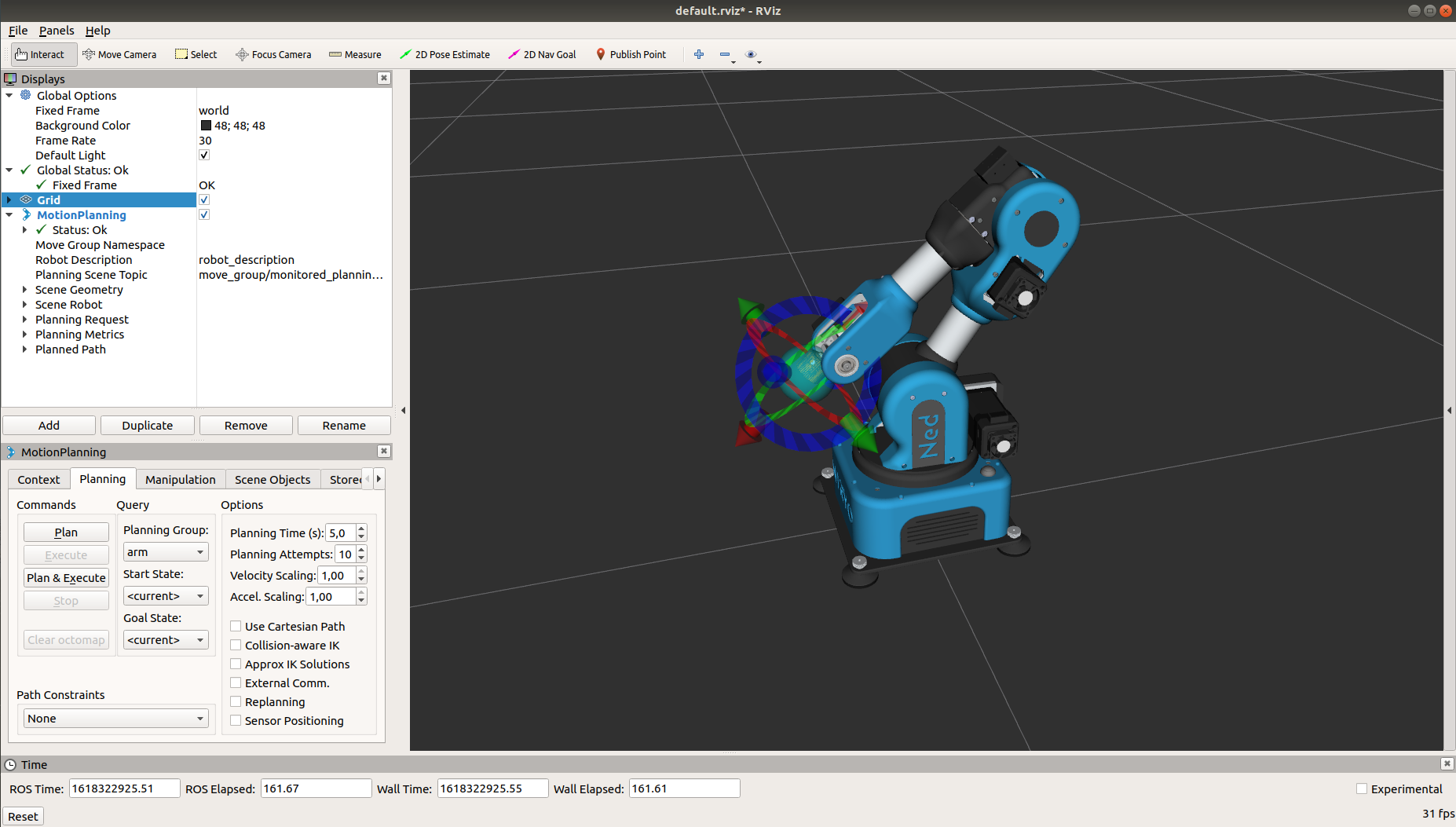
Ned in Rviz
Important
In order to make Ned/Ned2 move, you’ll have to:
Make sure Ned/Ned2 is well calibrated with:
rosservice call /niryo_robot/joints_interface/calibrate_motors "value: 1"
Deactivate the Learning Mode with:
rosservice call /niryo_robot/learning_mode/activate "value: false"
You should now be able to move the goal position and orientation of the end effector thanks to the differents arrows:
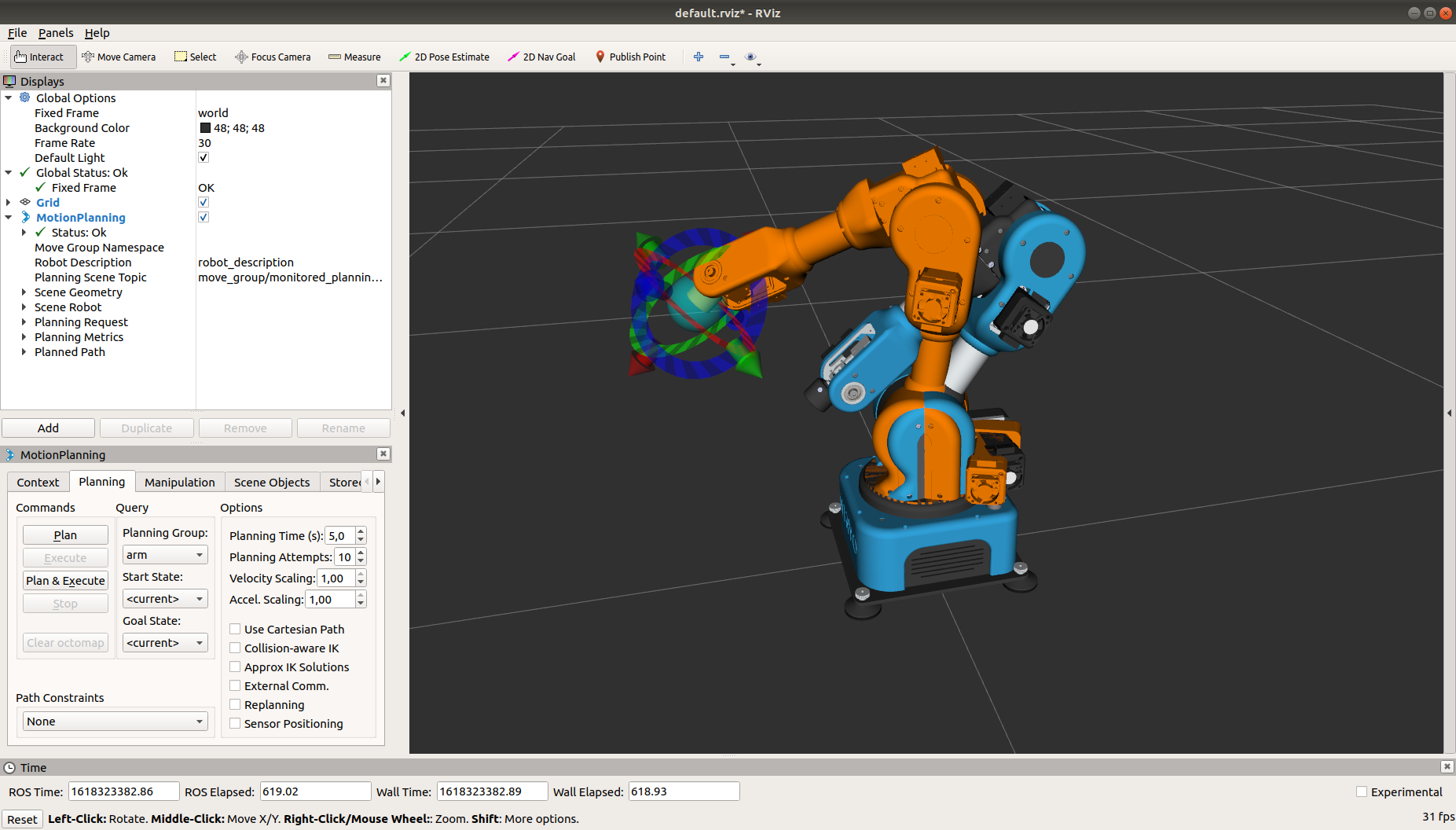
Define a new goal
Once the goal position is defined, click Plan and Execute so Moveit! calculate the path to the goal and execute it. You are now able to visualize Ned/Ned2’s current state in Rviz, and to control its movements through Rviz.
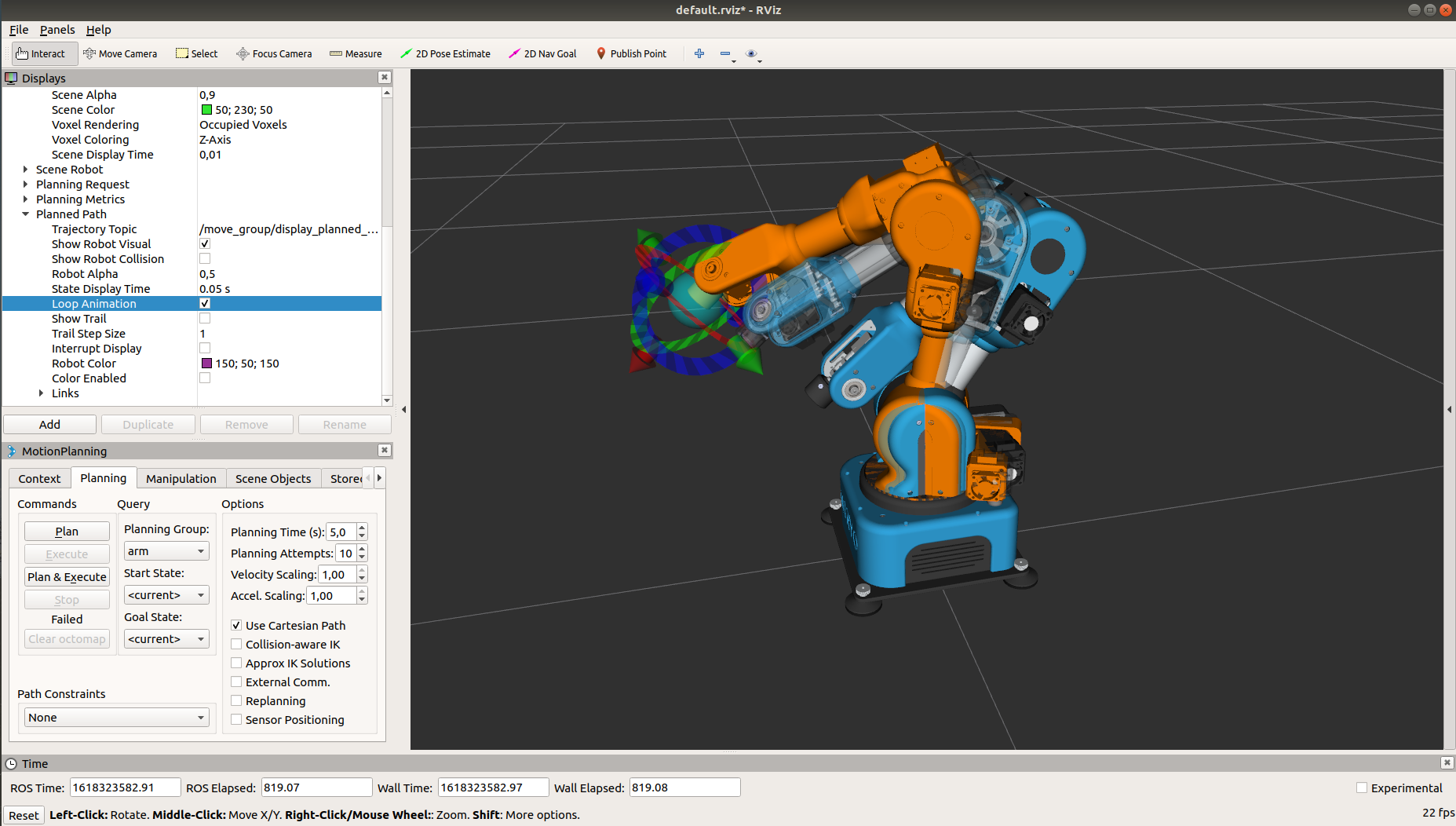
Plan and execute path
You can also play with the many options provided by MotionPlanning, like making Ned/Ned2 move along a Cartesian path!