
Niryo_robot_bringup¶
This packages provides config and launch files to start Ned and ROS packages with various parameters.
Launch files are placed in the launch folder. Only files with .launch extension can be executed.
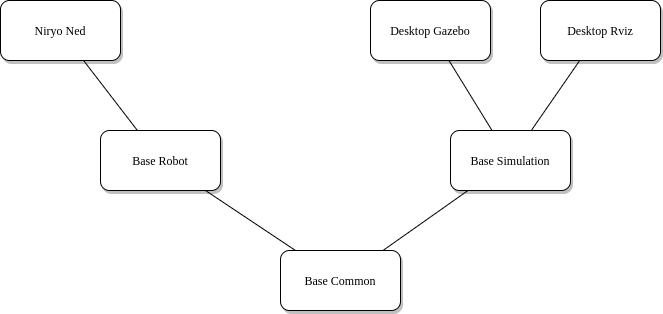
Bring Up Launch Files’ organization
On RaspberryPI¶
One¶
Command to launch Niryo One’s ROS Stack:
roslaunch niryo_robot_bringup niryo_none_robot.launch
Ned¶
Command to launch Ned’s ROS Stack:
roslaunch niryo_robot_bringup niryo_ned_robot.launch
Ned2¶
Command to launch Ned2’s ROS Stack:
roslaunch niryo_robot_bringup niryo_ned2_robot.launch
On Desktop (Simulation)¶
As the simulation happens on a computer, the hardware-related stuff is not used.
- For both of following launch files, you can set:
- gui to “false” in order to disable graphical interface.
Gazebo simulation¶
- Run Gazebo simulation. The robot can do everything that is not hardware-related:
- move, get_pose.
- use the camera (to disable it, set “camera” parameter to ‘false’).
- use the Gripper 1 (to disable it, set “simu_gripper” parameter to ‘false’).
- save/run programs, go to saved pose, …
Command to launch the simulation:
roslaunch niryo_robot_bringup desktop_gazebo_simulation.launch
To disable camera & gripper:
roslaunch niryo_robot_bringup desktop_gazebo_simulation.launch gripper_n_camera:=false
To run it with a specific hardware version, use the command:
roslaunch niryo_robot_bringup desktop_gazebo_simulation.launch hardware_version:=ned # one, ned2
Rviz simulation¶
Run Rviz simulation. You can access same features as Gazebo except Camera & Gripper.
To run it, use the command:
roslaunch niryo_robot_bringup desktop_rviz_simulation.launch
To run it with a specific hardware version, use the command:
roslaunch niryo_robot_bringup desktop_rviz_simulation.launch hardware_version:=ned # one, ned2
Notes - Ned Bringup¶
niryo_robot_base files setup many rosparams, these files should be launched before any other package.
- The following files are used to configure the robot logs:
- desktop_gazebo_simulation_trace.conf
- desktop_rviz_simulation_trace.conf
- niryo_robot_trace.conf