
With Ned¶
On the GPIO panels, the ports A and B can be used to connect the Conveyor Belt, and the ports C and D can be used to connect the IR sensor’s adaptator.
Important
Be careful to connect the IR sensor’s adapter in the correct way, respecting the wire’s color code
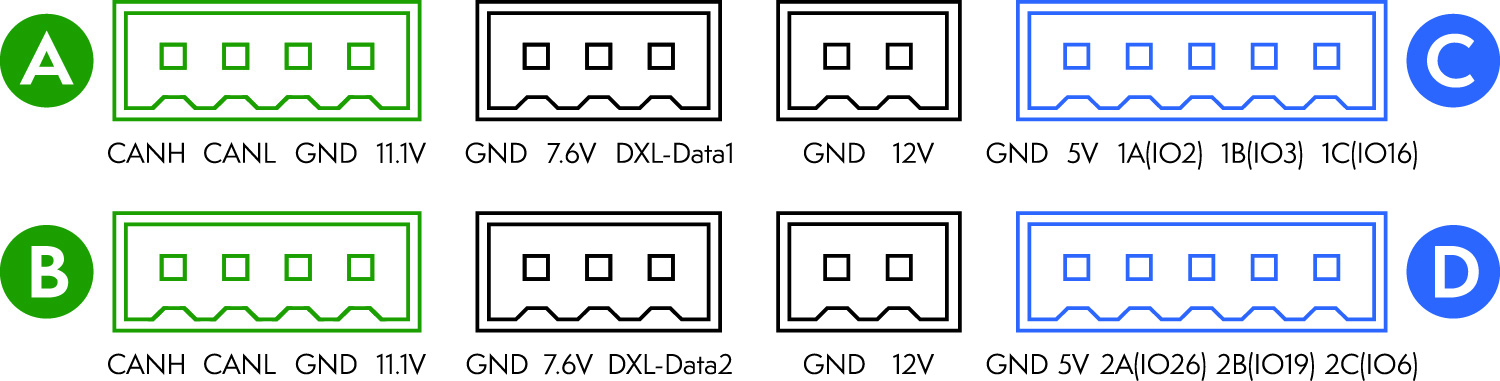
Ned’s GPIO panels¶
Ned - The Conveyor Belt¶
The Conveyor Belt communicates with Ned via Can Bus. To use the Conveyor Belt with Ned, connect the “Niryo - Conveyor Belt cable” on the side of the Conveyor Belt’s motor and on the back of Ned (port A or B).
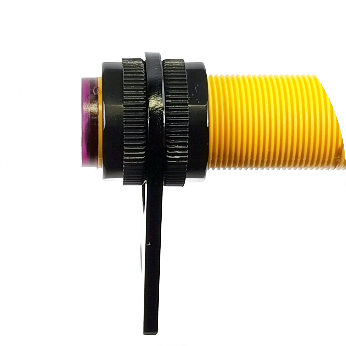
Ned - The IR Sensor¶
This infrared device can detect on object from a given distance. This distance can be adjusted between 6 and 80 cm. To get more information about the sensor and to set up the distance detection, please refer to this document.
- When the distance of the sensor < adjusted distance: an obstacle/object is detected.
The LED lights up,
The output is set to 0,
- When the distance of the sensor > adjusted distance: no obstacle/object is detected.
The LED lights off,
The output is set to 1.
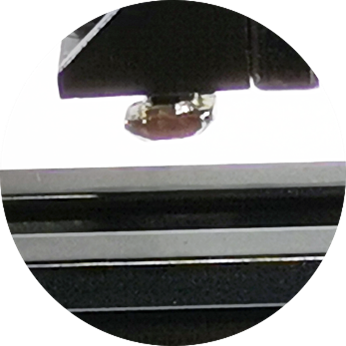
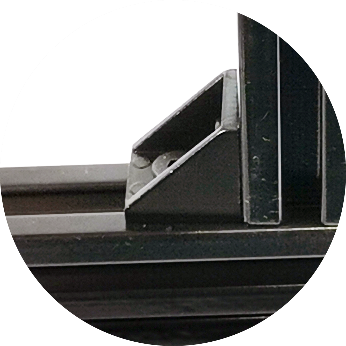
To mount it with the Conveyor Belt, please follow the steps illustrated below:

Step 1. Screw the first ring¶ |

Step 2. Add the sensor support¶ |
Step 3. Screw the second ring¶ |

Step 4. Put a blocker in the rail where you want the sensor to be¶ |

Step 5. Adjust the screw to secure the position¶ |
To use the IR Sensor with the Conveyor Belt and Ned, please connect it to the adapter for Ned and connect it on the back of the Ned (port C or D). Be sure to respect the keying of each connector to avoid any short circuit between GND, 5V and other GPIO pins.
The Mechanical Connector¶
We designed for Ned’s ecosystem a Mechanical Connector that is composed of an aluminum base for Ned and two links to connect a Workspace and a Conveyor Belt. This Mechanical Connector is included in the Vision Set. Assembling this mechanical structure allows the workspace and/or the Conveyor Belt to always keep the same relative position to Ned. If you own a Mechanical Connector, please follow these steps to mount the Conveyor Belt on it:
Step 1. Align the aluminum rail and the stopper¶ |
Step 2. Push the link into the rail¶ |
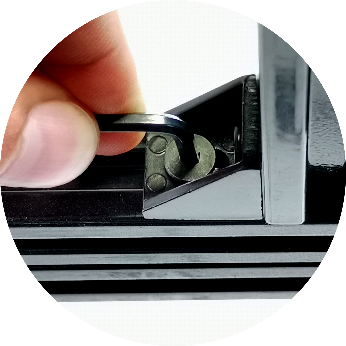
Step 3. Screw until the stopper turns a quarter turn and blocks into the rail¶ |
With the Control Box for an autonomous use¶
We designed the Conveyor Belt to be used with or without Ned. This section details how to use the Control Box to control the Conveyor Belt. If you use Ned to control it, please refer to the previous section.
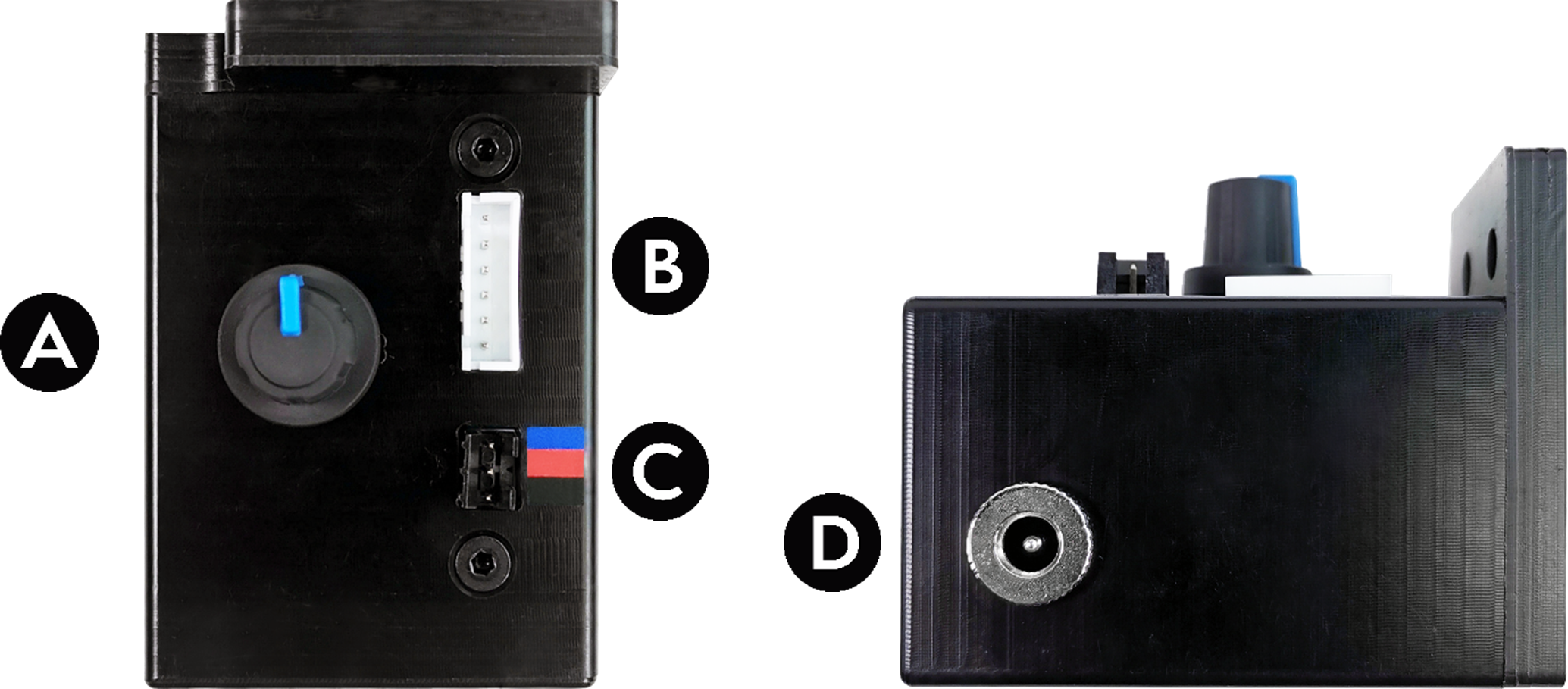
Rotary Potentiometer which controls the conveyor speed and direction
Conveyor connector interface
Digital input interface (Blue: GND + Red: 5V + Black: input pin)
Power supply
Control Box - The Conveyor Belt¶
First connect the Conveyor Belt motor to the Conveyor connection interface on the control box (B). Then, plug the power supply adapter to the Control Box (D).

Warning
Please be sure to respect this order. Connecting the Control Box to the power supply before connecting it to the Conveyor Belt could damage the products.
Control Box - The IR Sensor¶
This infrared device can detect a distance with an obstacle. This distance can be adjusted between 6 and 80 cm. To get more information about the sensor and to set up the distance detection, please refer to this document.
- When the distance of the sensor < adjusted distance: an obstacle/object is detected.
The LED lights up,
The output is set to 0,
- When the distance of the sensor > adjusted distance: no obstacle/object is detected.
The LED lights off,
The output is set to 1.
Simply connect the IR sensor to the digital input interface of the Control Box (C) by following the colors shown aside.